History of Robotic and Remotely Operated Telescopes The Fairborn Observatory 1979-1989
Posted:
By Russell M. Genet
Abstract
Automated instrument sequencers were employed on solar eclipse expeditions in the late 1800s. However, it was not until the 1960s that Art Code and associates at Wisconsin used a PDP-8 minicomputer with 4 K of RAM to automate an 8-inch photometric telescope. It took reliable microcomputers to initiate the modern era of robotic telescopes. Louis Boyd and the author (Russ Genet) applied single board microcomputers with 64K of RAM and floppy disk drives to telescope automation at the Fairborn Observatory, achieving reliable, fully robotic operation in 1983 that has continued uninterrupted for 28 years. In 1985 the Smithsonian Institution provided us with a suburb operating location on Mt. Hopkins in southern Arizona, while the National Science Foundation funded additional telescopes. Remote Internet access to our multiple robotic telescopes at the Fairborn Observatory began in the late 1980s. By 1989 the Fairborn Observatory, with its seven fully robotic telescopes, unmanned remotely-accessed mountaintop observatory, and part time staff of two, had illustrated the potential of automation to provide observations at heretofore unachievable low operating and maintenance costs. As the information capacity of the Internet exploded, observational modes beyond simple differential photometry opened up, bringing us to the current era of real-time access to remote observatories and global observatory networks. Although initially confined to smaller telescopes, robotic operation and remote access are now spreading to larger telescopes as telescopes from afar increasingly becomes the normal mode of operation.
Prolouge: Early Robotic Telescopes
David Todd (1855-1939), an astronomer at Amherst College, developed a cluster of automated cameras and small telescopes which he placed on an English equatorial mount. A container of sand was topped with a heavy weight and pierced at the bottom so that a uniform flow of sand allowed a counterweight to drop and power the slow movement of the assembly. Camera shutters were fired and plate holders were shifted in a precise sequence controlled by a pneumatic system using parts from a pedal organ. Todd’s first attempt at automation on December 22, 1889, took place during a solar eclipse expedition to West Africa. Although everything worked, he was clouded out. David persisted and on his third expedition (to Tripoli) he made the first successful observations with a robotic telescope on May 28, 1900 [1, 2].
Around 1965 a small computer-controlled telescope was put into operation at the University of Wisconsin’s Pine Bluff Observatory to provide real-time measurements of extinction coefficients. This 8-inch, f/4, off-axis, UBV photometric telescope was a spinoff from the space telescope program being actively pursued at Wisconsin [3, 4]. The system was controlled by the very first production (Serial #1) DEC PDP-8 minicomputer which featured a magnetic-core memory of 4096 12-bit words contained within a 4-inch-on-a-side cube. The system was reliable enough to operate 3 or 4 nights in a row without the need for human input. The Wisconsin-8 should, I feel, be credited for being the first robotic telescope in the modern sense of the word.
About the same time, several remotely located telescopes were controlled by linking them to a distant main-frame computer. A 50-inch Boller & Chivens telescope installed at Kitt Peak National Observatory was controlled remotely from a main-frame computer in Tucson some 40 miles away [5]. Although automation was achieved, the system was not reliable enough for continued operation and the telescope was modified to support manual observations. Interestingly, after over four decades of manual operation, this telescope was recently converted back to fully automatic operation, albeit controlled with an on-site microcomputer. Sterling Colgate also linked a remote robotic telescope to a main-frame computer in Socorro, New Mexico and similarly found that reliable operation could not be achieved. Somewhat more reliable operation was achieved with an on-site IBM-1800 by Greg Henry, Kenneth Kissell, and associates at a US Air Force telescope in Cloudcroft, New Mexico in the 1970s. What was really required for reliable, affordable mountaintop observatory automation, however, was a microcomputer.
Fairborn Observatory Orgins
In late 1978, I was a research supervisor at Wright-Patterson Air Force Base near Dayton Ohio. While attending graduate school at the Air Force Institute of Technology, I looked into what basic scientific research I could conduct on my own with modest personal funding. I quickly narrowed my search to astronomy and spent lunch hours for a week at the Institute’s library looking through the previous five years of the Astronomical Journal. I glanced at each article, asking: could I have conducted similar research and written a similar paper? Although I did not have the background for
purely theoretical investigations, I realized my background in electrical engineering would be helpful for instrumented observations. While many of the papers reported observations made with large telescopes—not practical for my small backyard on a limited budget—there were 28 papers reporting photoelectric observations of variable stars made with telescopes with apertures of 16 inches or less.
Drawing the obvious conclusion, I ordered a 10-inch Cassegrain mirror set from Coulter Optics, 10 and 12-inch worm gears from Thomas Mathis (I was his first customer), a 1P21 RCA photomultiplier, and a strip chart recorder. A TRS-80 microcomputer was purchased for data reduction which, except for data entry, was fully automated from the outset [6]. In early 1979 while waiting for the ground to thaw so I could dig the foundation for the telescope’s pier, I built the telescope and photometer and familiarized myself with the TRS-80 and BASIC programming. My observatory was named after the nearby town of Fairborn, Ohio.
Initial photometric observations were of eclipsing binary stars suspected of having large dark spots on one of the stars. As the star spots moved about or got larger or smaller, the shape of the photometric eclipse light curve reflected these changes. This cooperative program between about a dozen small observatories was coordinated by Douglas Hall, an astronomer at Vanderbilt University.
In order to meet Doug Hall and other photometrists in person, I organized a small workshop which was held at the Dayton (Ohio) Museum of Natural History in June 1980. Attendees Douglas Hall, Arne Henden, Ronald Kaithuck, Ken Kissell, Jerry Persha, and I all went on to play an active role in the development of early robotic telescopes after this initial meeting. Doug stayed on after the meeting and we launched the International Amateur-Professional Photoelectric Photometry (IAPPP) organization [7], together editing the first issues of its quarterly publication, the IAPPP Communications, which continued for over two decades with over 1000 subscribers from 40 countries. I suggested meetings also be held on the west coast, and IAPPP West began its annual conferences in 1981 and has held them every year since then. IAPPP West was recently renamed the Society for Astronomical Sciences.

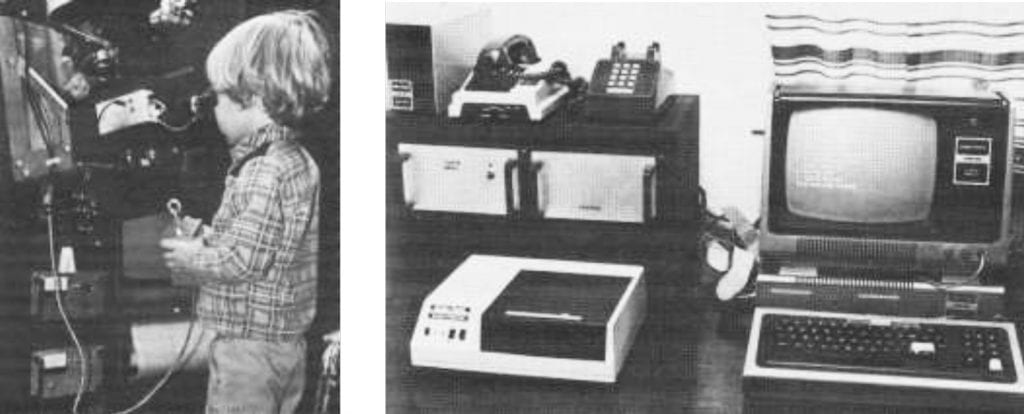
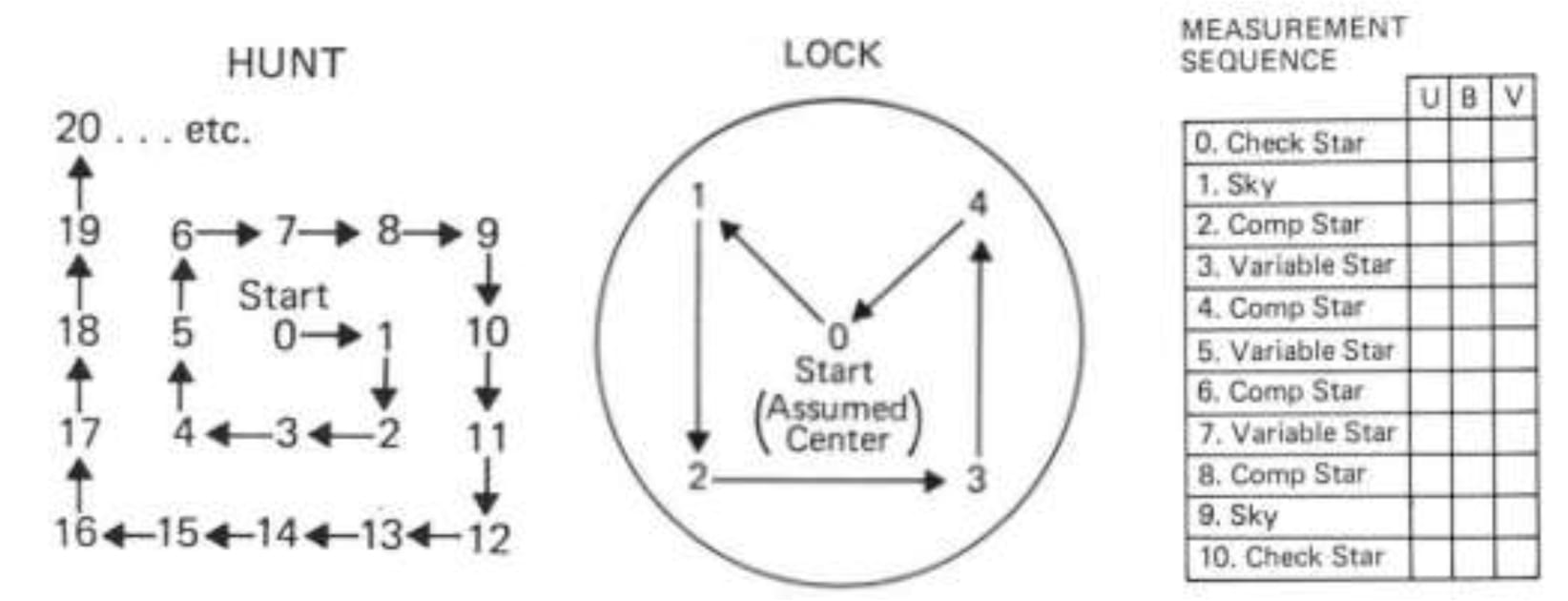
Making photometric observations was time consuming, tedious, and boring. Stars had to be found and centered, filters changed, and the strip chart recorder turned on and off—the same thing over and over, hour after hour. On cloudy nights the strip chart results had to be painstakingly measured with a ruler and the numbers typed into the TRS-80 for final reduction which, gratefully, was totally automated. To make the process less tedious and more efficient, I developed an interface between the photometer and TRS-80 that not only logged the data directly but also changed the filters via a stepper motor. As the computer had to be told what was being logged, I wrote a BASIC program that led me as the observer through a sequence of variable, comparison, and check star and sky observations in U, B, and V filters. The instructions were displayed on a remote monitor in the observatory and I responded by following the instructions and making choices on a remote keypad [10]. As each 10-second integration proceeded, the changing signal was plotted on the remote monitor—a “paperless strip chart recorder” of sorts.
The computer was now in charge, doing everything except finding and centering the stars—which it delegated to me. Now I was totally bored! My wife was complaining about my late hours, while at the laboratory where I was a branch chief the director wondered why I was falling asleep in staff meetings. Obviously the computer needed to take over finding and centering stars so I could get a good night’s sleep, thus restoring marital bliss and the good will of my boss!
Automation at the Fairborn Observatory
In 1981—while visiting a sister Air Force laboratory division in Mesa, Arizona—an amateur astronomer, Jeff Hopkins, kindly introduced me to a number of Phoenix-area photometrists, including Louis Boyd. Lou had been helping Richard and Helen Lines with photoelectric equipment at the Lines’ observatory in Mayer, Arizona. Richard operated the telescope, while Helen recorded the observations. Lou kept suggesting how various portions of the process could be automated. Content with their smooth two-person manual operation, Helen told Lou that they were not interested, and if Lou wanted an automated system he should go build his own, which Lou set out to do. Having a common goal of full automation, Lou and I joined forces under the rubric of the Fairborn Observatory (east and west).
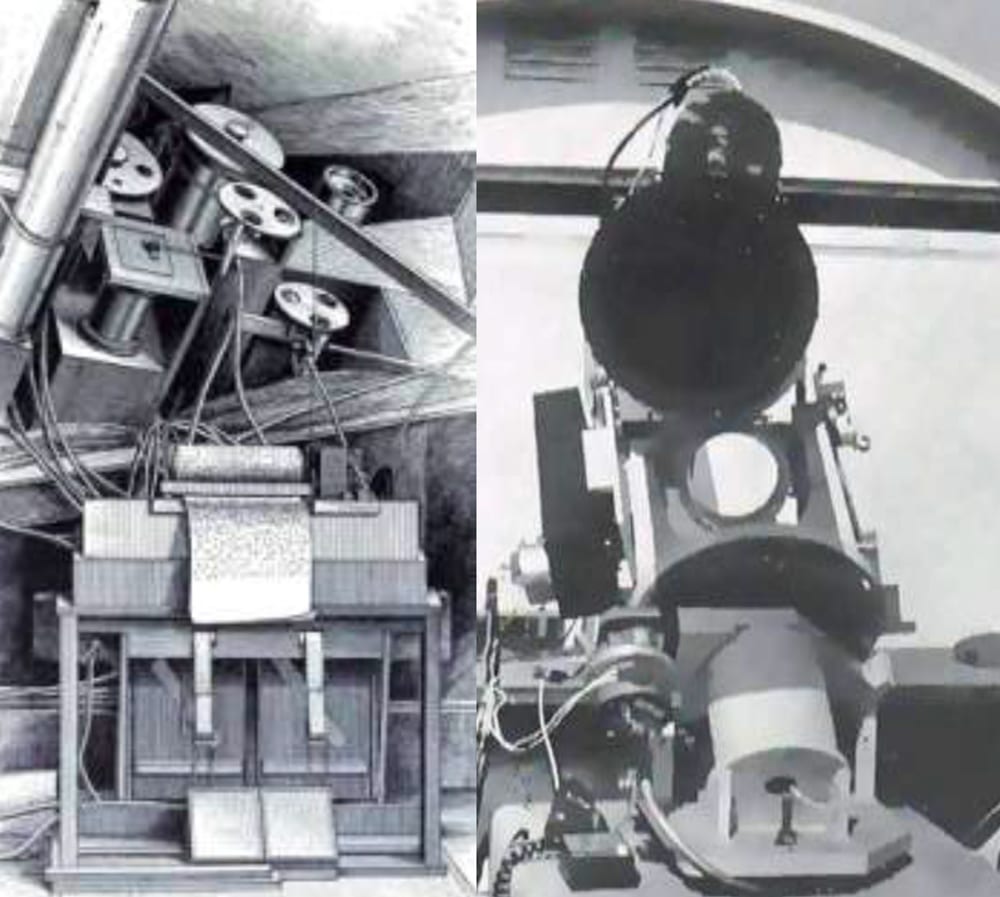
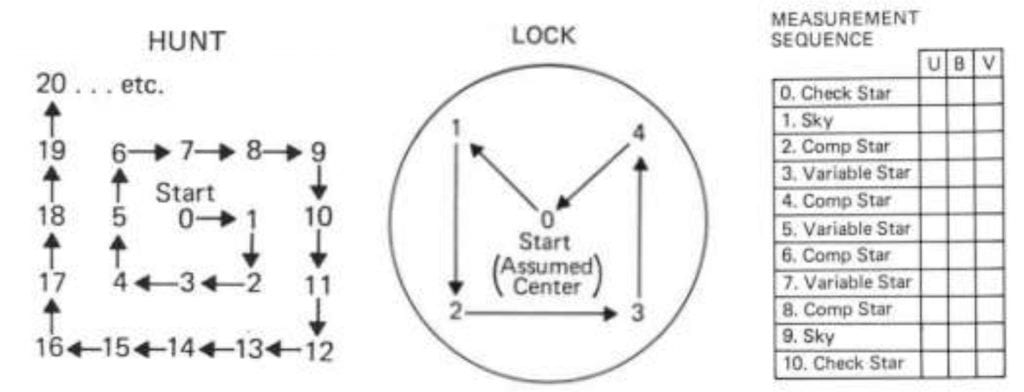
What we developed was simple low-cost automatic photoelectric telescopes (APTs) that did not even have (expensivefor us) position encoders. Each axis was driven by a stepper motor under computer control. The photometer not only measured the brightness of stars but, via the Hunt and Lock routines we devised, was able to find and center stars. A symmetrical sequence that involved 10 slews and some 33 individual 10-second observations was made of the variable, comparison, and check stars and a sky background in a “group” to obtain differential photometric magnitudes in three colors. The entire sequence, which involved hundreds of small telescope movements, took about 11 minutes to complete. In a typical winter night, about 50 groups could be observed, involving the finding and centering of over 400 stars. The two initial Fairborn Observatory robotic telescopes (the Phoenix 10 and Fairborn 10) continued to operate for over two decades, each finding and centering about 3 million stars and making over 8 million 10-second integrations.
Initial automatic operation was achieved at the Fairborn Observatory (west) in October 1983 with Lou’s Phoenix 10 telescope located in his backyard in Phoenix, Arizona. I achieved automatic operation at Fairborn Observatory (east) some six months later with the Fairborn 10 [14, 15, 16].
In 1983, Perry Remaklus at Willmann-Bell asked me to write a book on the microcomputer control of telescopes. I was not very far into this book when a large package arrived in the mail—a fan-folded printout of a Master’s thesis on Telescope Control written by Mark Trueblood at the University of Maryland. Mark wondered if it would serve as the basis for a book. I assured him that it would and invited him to be the first author. Our book, Microcomputer Control of Telescopes, published in 1985, was widely read [17]. Mark and I wrote a second version a dozen years later [18].
Ohio, unlike Arizona, was not a good location for automated photometry. Not only was it often cloudy, but the weather would change, rather unpredictably, during the night. I began sleeping out on a cot with the telescope on clear nights, hoping that if it clouded up and started raining I would wake up in time to close the roll-off roof before the telescope was completely drenched. While I could have installed weather sensors and roof control and fully automated the observatory, a better solution soon presented itself.
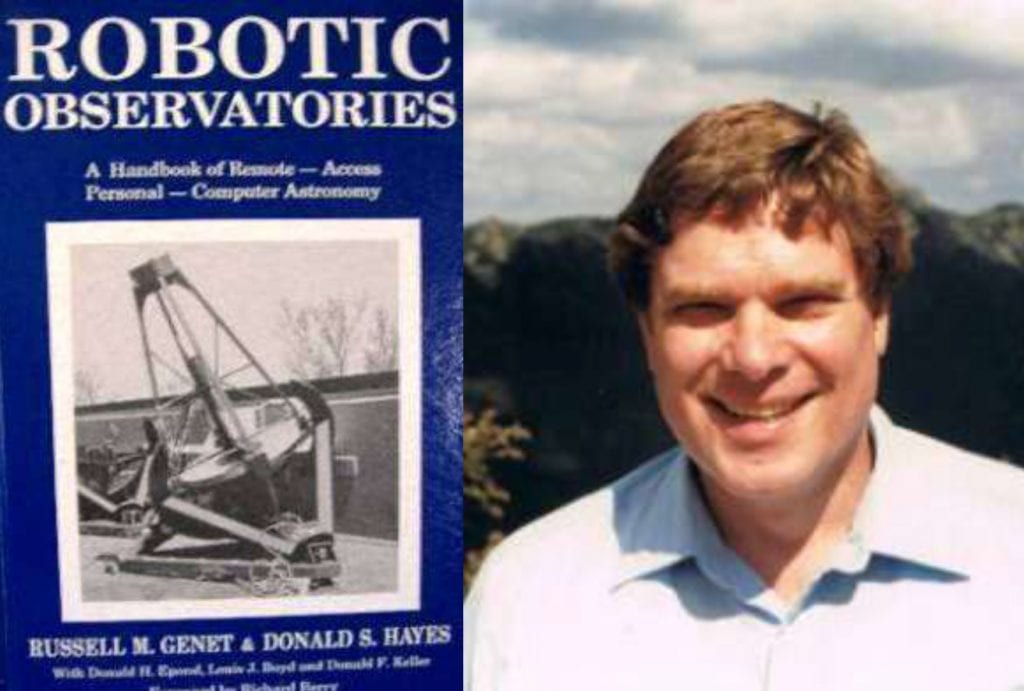
Mark Trueblood and Russell Genet’s two books (1985 and 1997) on the microcomputer control of telescopes were quite influential not only with respect to telescope control, but also the full automation of telescopes. Mark (right) has worked for many years as an instrumentation engineer for the National Optical Astronomical Observatories.
The Automatic Photoelectric Telescope Service
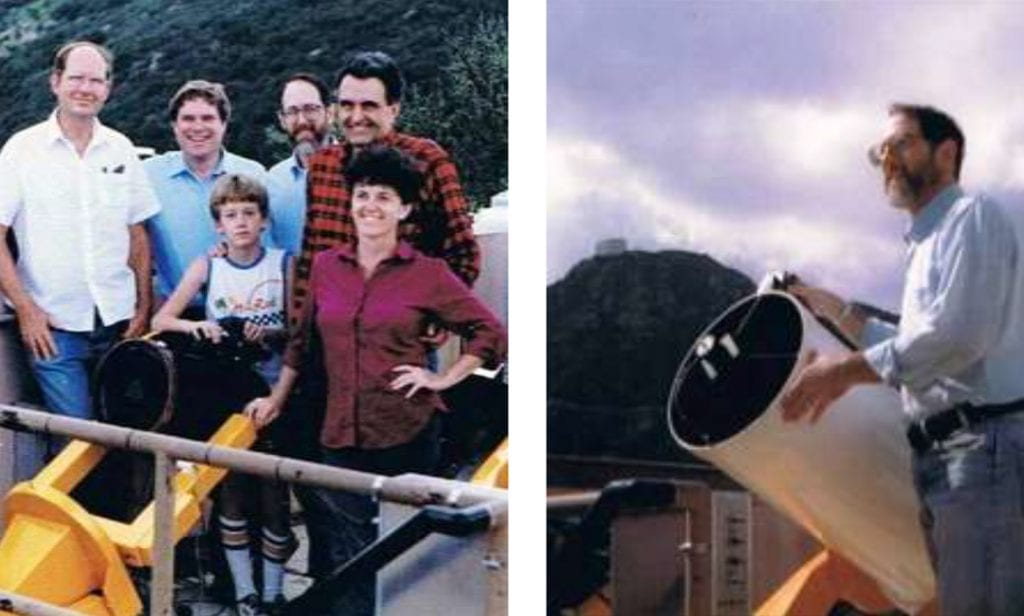
In 1985, I attended the winter meeting of the American Astronomical Society held that year in Tucson, Arizona. One afternoon during the meeting, Sallie Baliunas—an astronomer at the Harvard-Smithsonian Center for Astrophysics— took Lou and I on a tour of the Smithsonian Astrophysical Observatory and the Multiple Mirror Telescope, both on Mt. Hopkins south of Tucson about half way to the Mexican border. We fatefully drove past an unused roll-off-roof building that Sallie explained to us had been used for satellite tracking with a laser ranger and Backer Nunn camera.
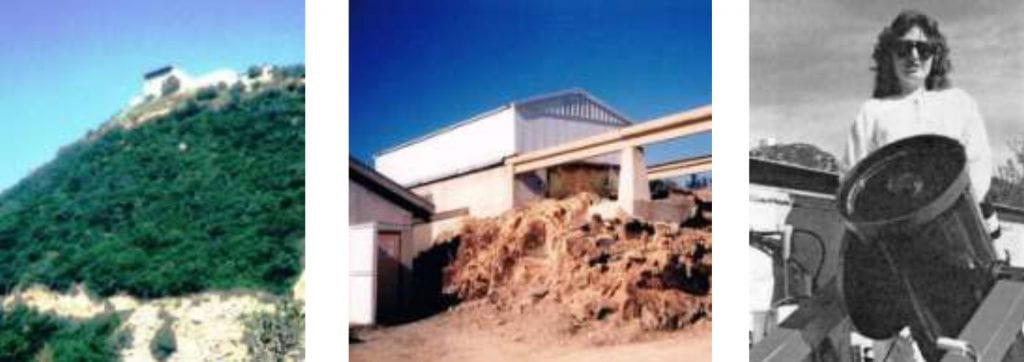
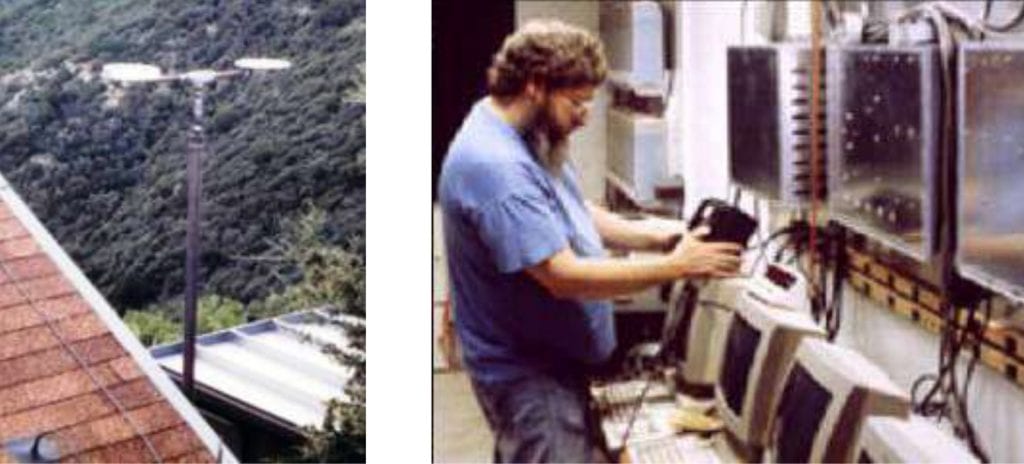
For 10 years the Automatic Photoelectric Telescope (APT) Service on Mt. Hopkins was a joint operation between the Fairborn Observatory and the Smithsonian Astrophysical Observatory [19-23]. Located at 8010 feet elevation on the top of a ridge (left) between the Multiple Mirror Telescope and the Fred L. Whipple Observatory, the Fairborn Observatory telescopes were housed in a roll-off roof (center). Sallie Baliunas (right) was the key APT Service participant from the Harvard-Smithsonian Center for Astrophysics.
Although it was shirtsleeve weather in Arizona, it was -20 F in Ohio, and my wife mentioned that our water pipes had frozen solid. Recognizing a unique opportunity, I suggested that we move to Arizona. Six months later we bought a house in Mesa, Arizona where I had been assigned to our sister Air Froce laboratory as a Branch Chief. A few months later I visited David Latham, the Director of the Smithsonian Astrophysical Observatory. We agreed that the unused satellite tracking station would make an excellent home for our robotic telescopes. A ten year agreement was drafted. The Smithsonian Institution would provide the facilities, utilities, and use of 4-wheel drive vehicles to negotiate the steep dirt access road. The Fairborn Observatory would provide and operate the robotic telescopes. My Fairborn 10 telescope, moved to Arizona from Ohio, would be devoted to Sallie Baliunus’ solar-type star research program to provide photometric VRI measurements to compliment her spectroscopic observations being made with the historic 60-inch telescope on Mt. Wilson. When Dave notified us that the Secretary of the Smithsonian Institution had approved the agreement, Lou and I had my Fairborn 10 robotic telescope bolted down to the floor of the observatory in less than 24 hours. Dave was very impressed! Soon we moved the laser ranger out of the way and also bolted Lou’s Phoenix 10 telescope to the floor.
After I gave a talk on our robotic telescopes to the Astronomy Division at the National Science Foundation, they suggested we submit a proposal for a third robotic telescope. We teamed up with Doug Hall to propose a 16-inch telescope that was soon built by DFM Engineering. The Fairborn Observatory provided the control system.
For over a year Lou and I spent most of our weekends and vacations on Mt. Hopkins. We operated the robotic telescopes while we were there and worked on automating the observatory itself so we would not have to continue making the long, four-hour drive from Phoenix to our observatory. We designed and built the weather sensors ourselves, modified the northern wall of the observatory to tilt down, thus giving our telescopes access to the northern skies, and installed a large bank of batteries in our control room to power the closure of the five-ton roof when commercial power failed (which was not unusual). A microcomputer was dedicated to reading the weather sensors, checking the roof and telescope’s limit switches, controlling the roll-off roof and tilt-down wall, and authorizing the robotic telescopes to observe or commanding them to park. The observatory control computer also kept a log of the commands it issued, weather sensor readings, and the status of each telescope.
On weekends, when we were on the mountain, we enabled the observatory to run itself. Finally, after reasonably reliable autonomous operation for many weeks had been achieved, we drove off one morning without disabling the observatory, leaving it to run without any human supervision or oversight whatsoever. It was a nerve-wracking moment. Should the
telescopes fail to park properly, the low roll-off roof could “decapitate” the telescopes. If the roof failed to close, it could rain or snow on the telescopes. For many months we could not resist, now and then, calling the night operators at the other (manual) telescopes on the mountain and asking them to take a peek in our observatory. Were the telescopes still operating okay? One day we got a call from one of the Multiple Mirror Telescope day crew members who informed us that as he drove by our observatory he noted that the roof rolled open, then it rolled closed, then it rolled open …. While our telescopes normally operated reliably, not really knowing what was happening at our observatory began to drive us nuts!
REMOTE ACCESS
To reduce our worries, we devised what we called a “Morning Report.” Every morning, after the observatory control computer had parked the telescopes and closed the roof, it initiated an Internet call to us and downloaded a summary of the previous night’s operation in terms of weather, observatory control commands, and how successful each telescope had been in making its observations. This greatly reduced our worry factor, although the reports were occasionally inconclusive. For instance, we once received a morning report that the previous night had been clear but that it had been raining—same thing the next report. Puzzled we called one of the night telescope operators who informed us it had been clear both nights. A drive to the observatory revealed that a bird had used our rain sensor as a toilet facility, thus producing the erroneous rain indications.
By 1987 we had a smooth running operation. Once a list of program stars (and the attendant comparison and check stars and sky location that formed a group) was loaded on a telescope along with group observational priorities, whether or not they should be observed with respect to the moon being up, etc., the telescope would itself choose the groups to observe. Various rules such as “first to set in the west” and “nearest the meridian” could be associated with each group; thus this was not a rigid observational sequence list but rather a quasi “artificial intelligence” approach (although the “intelligence” of the telescopes was limited by the slow speed and small size of our computers).
Infrequently loading the stars “once” and letting the “AI” program manage observations worked well for relatively fixed observing programs such as Sallie Baliunus’ solar-type stars on my Fairborn 10, or Greg Henry and Doug Hall’s spotted eclipsing binary program on the Vanderbilt 16. It did not work so well on Lou Boyd’s Phoenix 10 telescope which had a mix of often short-duration observational requests from multiple observers in our “rent-a-star” program where groups (33 separate observations taking a total of about 11 minutes) were made for $2 per group. It was time-consuming to keep up with the changing requests and interface with the multiple Phoenix 10 users. We did, after all, have an observatory to run, not to mention full-time jobs. This difficulty was resolved by assigning a “Principle Astronomer” (PA) to each telescope. Mike Seeds kindly volunteered to be the PA for the troublesome Phoenix 10 telescope. He handled the interface with all of its many users, resolved observational conflicts, provided us with the consolidated observational program, provided the multiple users with uniform data reduction, kept an eye on the quality of the data, and collected the modest $2 fee for each group successfully observed [24, 25]. This worked well indeed, and every telescope from then on was always assigned to a single PA. Mike was the PA for the Phoenix 10 for over two decades, serving dozens of users, including many students—a major contribution to automated astronomy.
Four times a year we mailed a floppy disk with a quarter’s worth of data to each PA. We were always concerned that some equipment degradation that subtly ruined the data would not be discovered until the PA reduced the data. While this never happened, it did inspire us to devise a procedure and high level language—the Automatic Telescope
Instruction Set (ATIS)—that allowed the PAs to send in observational programs via the Internet and, each morning after observatory shut down, have the previous night’s observations automatically sent to them via the Internet for immediate reduction if they so desired [26, 27, 28]. Bandwidth requirements for aperture differential photometry were modest (unlike imaging observations), and was readily handled by the Internet in its early days.

Although the precision of our automated photometry was good, it was not as good as the very best manual photometry such as that produced by Wes Lockwood at Lowell Observatory. Not to be outdone by mere human observers, I organized two workshops on “Precision Automated Photometry.” Under the guidance of Andy Young, a photometry expert at California State University, San Diego, we thoroughly discussed all the possible errors that might affect the precision and accuracy of differential photometric measurements. We then considered how we might minimize these error sources through photometer design, automated observations of standard stars throughout the night, and automated but human-monitored quality control analysis [29, 30]. Lou Boyd designed a precision photometer, and Greg Henry and Lou developed the quality control procedures and analysis program [31, 32]. The result was photometry of the highest precision and accuracy—better than what human observers could produce.

As word of our successful operation spread, additional telescopes were funded by the National Science Foundation and others. We designed a compact 0.8-meter (32-inch) telescope specifically for automated photometry. We were able, after the Backer-Nunn camera had been removed, to “shoehorn” four of these telescopes within the remaining space under our roll-off roof. These telescopes were so close together that they had to be networked together so they would not run into one another. They followed a simple “first into common space gets to complete its observations” rule. Annual winter conferences at the Lazy K-Bar Ranch near Tucson, summer workshops, many papers, and a number of books [33-40] spread the word on what could be done via full automation and remote access.
With our building fully occupied, the operations at the Fairborn Observatory on Mt. Hopkins steadied out. I wrote a book, Robotic Observatories, with my good friend and astronomer Donald Hayes, that documented much of what been learned in the pioneering 1979-1989 decade at the Fairborn Observatory [41]. It also considered what might unfold in the future for robotic and remotely accessed telescopes—quite prophetically it turned out. Of course there were many other related developments beyond the Fairborn Observatory between 1979 and 1989. These have been described by Alberto Castro-Tirado in his masterful history of robotic observatories [42].
I recently asked Lou to summarize “lessons learned” from his point of view. His reply:
The things which are most difficult to automate are:
* Site security. Some humans will steal or destroy anything which isn’t closely watched. Automated cameras