
{kind=link}
{kind=link}
{kind=link}
T-600 Direct-Drive Gimbal
Price: $65,000.00
*Price is based on PlaneWave’s Pricing Policy
The PlaneWave T-600 gimbal is engineered to meet the needs of the most demanding applications. The T-600 is capable of carrying payloads on each side of the altitude axis for applications where multiple instruments are necessary. With rugged environments in mind, the T-600 comes standard with 2-layer non-contact sealing at each motion surface to prevent water (light-to-moderate rain) and debris entry.
- Payload capacity of 600 lbs (272 kg)
- High Torque, double-stacked direct-drive motors on each axis
- Smooth, Fast, and Virtually Silent
- Acceleration up to 150°/second² – (See System Performance)
- Velocities up to 150°/second* – (See System Performance)
- High-Resolution Absolute Encoders on each axis
- Incredibly precise pointing and tracking
- Zero Backlash and Zero Periodic Error
- Advanced PointXP mount modeling software included
- Designed for rugged environments
- Electronics enclosed within the mount
- Double-layer labyrinth seals on each axis
- Optional contact gasket seals for full weatherization
- Through the Mount Cabling and Weatherproof Cable Passthroughs
- Supports Alt/Az, Alt/Alt, or Equatorial Configurations
- Limitless Az Rotation option available
*T-600 performance specifications are highly dependent on mass, mass distribution, and stiffness of payload.
Description
The PlaneWave T-600 gimbal is engineered to meet the needs of the most demanding applications. The T-600 is capable of carrying payloads on each side of the altitude axis for applications where multiple instruments are necessary. With rugged environments in mind, the T-600 comes standard with 2-layer non-contact sealing at each motion surface to prevent water (light-to-moderate rain) and debris entry.
System Performance
System Performance
|
Acceleration (Azimuth and Altitude) |
Acceleration up to 150°/second² *Depending upon installed payload-induced moment of inertia |
|
Velocity |
Up to 150 degrees per second *Depending upon acceleration and distance traveled |
|
Pointing Accuracy |
<5-arcsecond RMS* with PointXP Model *Under stable environmental conditions |
|
Pointing Precision |
2 arcseconds at sidereal velocity |
|
Open Loop Tracking Accuracy |
0.2 arcseconds RMS over 300 second exposure at siderial rate |
|
Open Loop Axis Following Error *Dependent on Payload |
|
|
Internal Servo-Loop (Drive to Motor) |
10 kHz cascaded velocity/position controller, PID + Filters |
|
Software Command Round-Trip |
5 – 25 msec (depending on application) |
|
System Natural Frequency |
20 Hz or greater (for gimbal only) |
Mount System
Mount System
|
Type |
Alt-Azimuth / Equatorial Direct-Drive Mount |
|
Weight |
605 lbs |
|
Max. Load Capacity |
600 lbs (with payload limited to 100 kg-m² moment per port with center of gravity ≤ 15 inches from mounting surface and an lowest eigenmode frequency of 20 Hz. i.e. dual mounted CDK24 telescopes are compatible) |
|
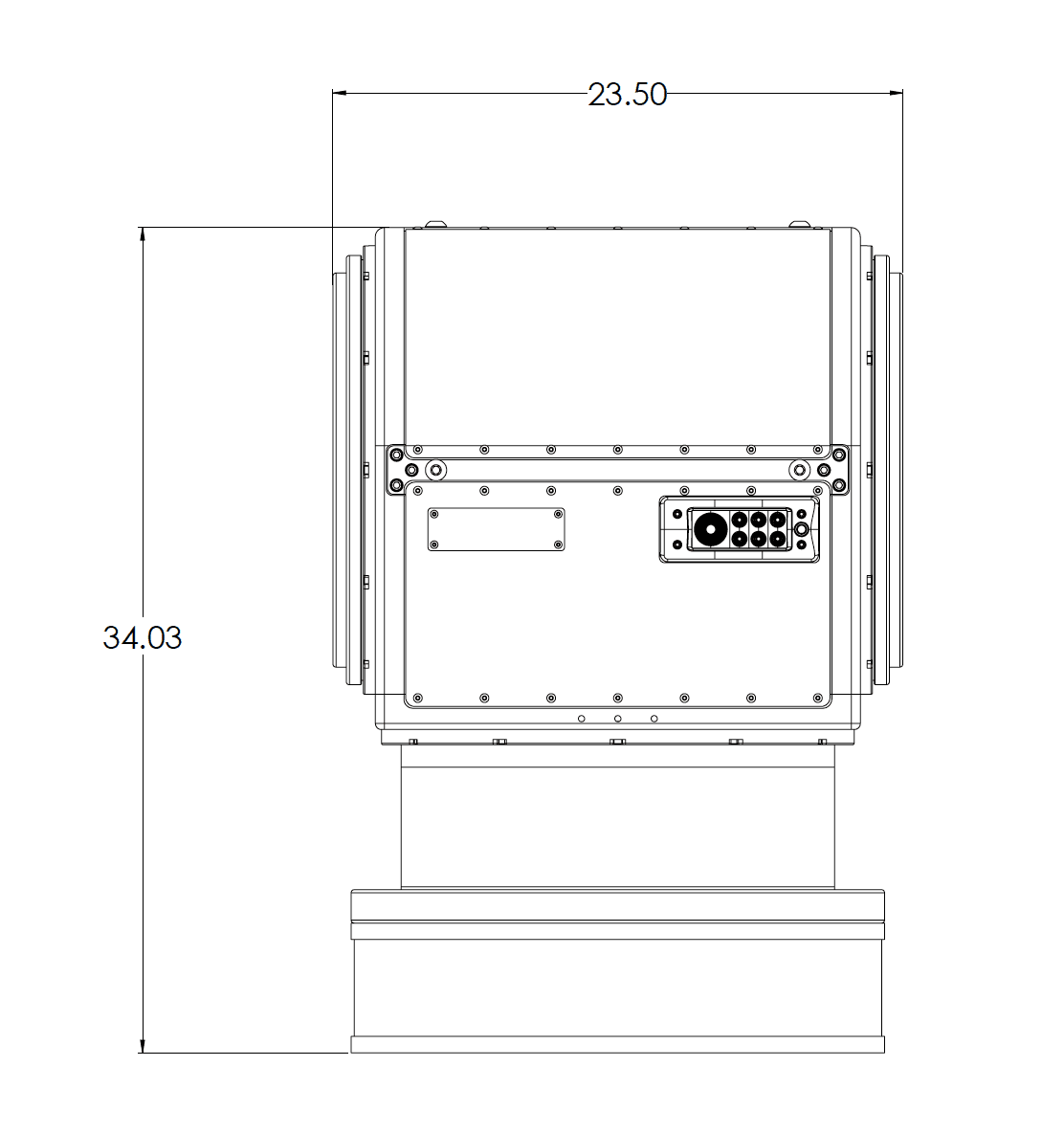
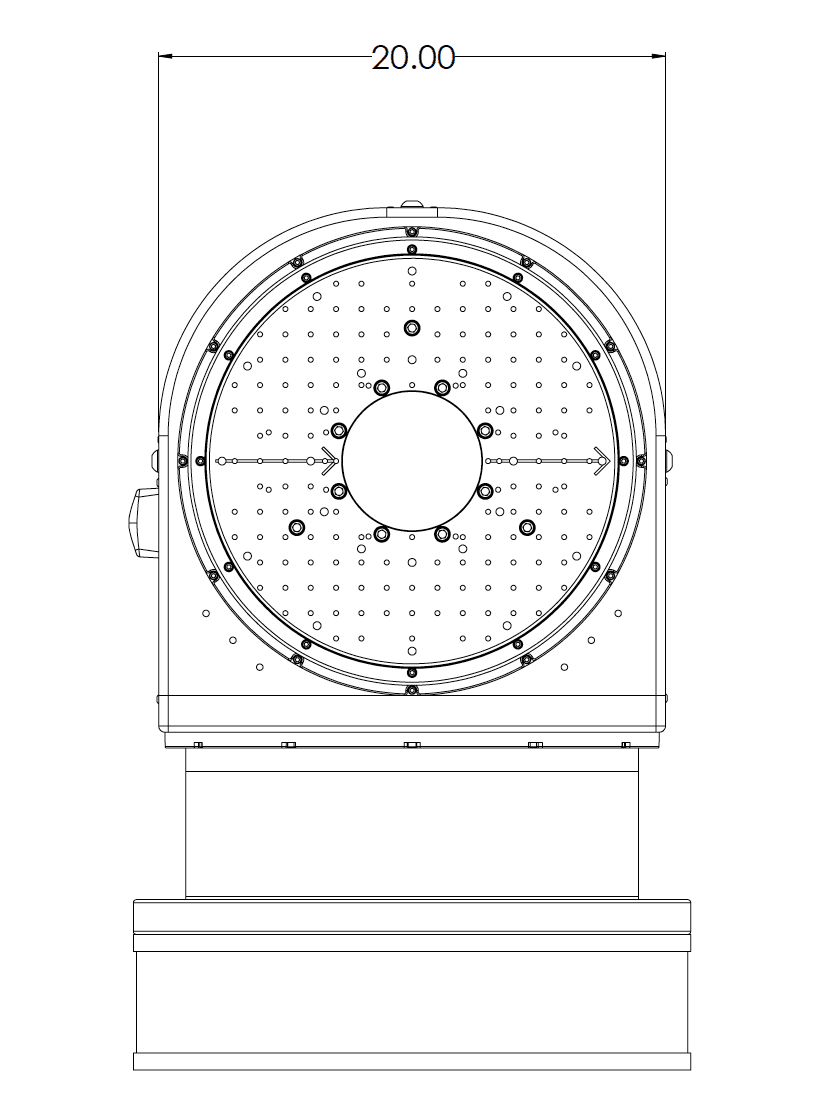
Dimensions |
34” x 20” x 23.5” (H/D/W) |
|
Latitude Range |
0 to 90 degrees, Northern and Southern hemispheres |
|
Motor Torque (Azimuth and Altitude) |
127 ft-lbs (peak) |
|
Azimuth Axis Range of Motion (Optional) |
660º Limitless range available |
|
Altitude Axis Range of Motion |
Fully Adjustable (-45 to +225º default range) |
|
Cable Management |
Through-the-mount cabling |
|
Coudé Path (Optional) |
Limits elevation axis range of motion to 180º |
|
Power Requirement |
|
|
Operating Temperature Range |
-30 C to +50 C |
|
Storage Temperature Range |
-50 C to +70 C |
Mechanical Structure
Mechanical Structure
|
Gimbal Assembly |
Fully CNC machined construction (Surface finish treated with UV resistant coating on all exposed metal surfaces) |
|
Default Weatherization |
2-Layer non-contact labrynth sealing at each motion-surface to prevent water (light-to-moderate rain) and debris entry. *Optional rubber seals may be added for further ruggedization. |
|
Azimuth Bearing |
4-way loaded radial ball bearings |
|
Altitude Bearing |
4-way loaded radial ball bearings |
|
Instrument Mounting |
Breadboard plate on both mounting surfaces (see interface document for complete mounting information) |
|
Lifting Points |
Present for lifting in “any orientation” |
Motion Control
Motion Control
|
Drive Electronics (Azimuth and Altitude) |
Elmo Motion Control Systems industrial grade off-the-shelf brushless motor drives |
|
Motors (Azimuth and Altitude) |
Each axis includes a double stacked direct-drive 3 phase axial-flux torque motor |
|
Encoders (Azimuth and Altitude) |
26-bit absolute encoder ring with readhead |
|
User Interface |
PlaneWave Interface 4 (PWI4) Control Software with integrated PointXP mount modeling software by Dave Rowe. Includes ASCOM driver. |
|
Advanced Timing Features (Optional) |
Timestamped using GPS Reciever, or PTP/NPT Server <100-microseconds accuracy |